WinchSpeed 

At Kaldred Airport, we are two flying clubs. And just as in the old days it was thought that the Molboers were strange some, we also think in Kalundborg Flyveklub that those Polytes in PFG are a little strange. In PFG it is guaranteed that we in KF are of all times :-)
There is so little war on the knife in all friendliness, so when we help each other in the morning to assemble planes, the wings of the other club's planes are much heavier than our own.
But help in everyday life we do, and it works really well. If only one of the clubs was present at Kaldred, I actually think it would become really difficult.
But the war flared up a bit when Morten Bennick proudly showed me a print they had made for a new variometer. It looked fine, but then I heard how it should interface to the internet, and through it you could also tell the winch driver if he was driving too slow or fast, I mentally backed out. Why should I install another variometer in my plane, I already have the best in the world? ( LookOut Vario ). And the power consumption had to be huge.
Then home on the kitchen table, and 2 weeks later I presented the prototypes of my system to Morten and Stig Øye, it was far from finished, but had already functioning Android interface and an App which showed the speed difference to the winch driver, but only with test data.
Curiously, it was the specifications from my system that ended up in the article in Nordic Gliding about PFG's system. If an old junkie like me could do something like that, PFG's total engineering staff could probably too :-)
Enough history, now for the present. I actually have a working system now. That is what is described here.
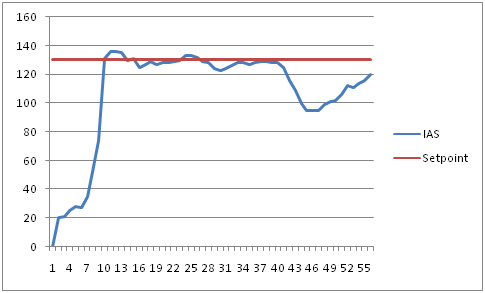
In short, the IAS is measured in the aircraft, and the difference from the desired value is sent by means of LoRa technology to the winch, so the winch operator can accelerate more or less to approach 0 in difference. It's not easy, I just have to say hello and say! Clearly requires some getting used to for the winch drivers.
As can be seen, there is clearly a resonant frequency with a period time of 10 to 13 seconds. It takes quite a long time from discovering a change, changing the throttle, accelerating or decelerating the drums (which have a large moment of inertia) until the change propagates up the string, and finally accelerates or decelerates the aircraft.
It is very reminiscent of the resonance problems we had when pulling out steel wires: If you intuitively braked the drums when the wire became slack, you often amplified the natural oscillations with wire breakage as a result. Instead, one had to brake when the drums accelerated up to speed.
On the WinchSpeed system, you have to adjust accordingly when you see an unwanted increase or decrease in speed instead of waiting until you get so far away from the optimum that the red LEDs light up. Knowing this is not necessarily easy, as the focus must of course first and foremost be on the aircraft.
It is clearly most difficult right after take off, when the plane transitions to a sharp rise, and apparently even more at the top of the start, where the speed slowly creeps upwards, to end up with a drastic rise if there has been no gassing down.


I'm a little impressed with the fine sine curve generated at the 2021-09-18 start. It requires craftsmanship :-)
A little account of the first flights with the system can be read about here: Flight No. 2.docx .
It is also from here the image above to the right originates.
NOTE: There was clearly an improvement with the new LedDisplay, the last 2 starts in the picture.
The first 2 were with a pointing instrument, it was difficult to see.
This is what the LedDisplay module looks like, it is placed on a suction cup so that the winch operator can place it where it fits best.

And here is a replay of a winch start in OP 2021-08-21 where you can see the new LED display in operation (it was not in use during the start itself):

|
Pay particular attention to how the speed creeps up during the last part of the start, and causes a slightly strong reaction from the winch driver when the red LED started flashing (at the first instrument display). It took a lot of acrobatics from the winch driver to see this, so well done! And as the winch driver stated, he himself was aware that the reaction was a bit too strong, but it is not easy to fine-tune when the winch is almost idling.
Can it be felt on the starts? Yes, I think so. Is pt. the only one who has flown with the system and I am well satisfied. Eg. I got 2 starts this Saturday, both to just over 400m with a strong 90 degree crosswind. It can not be complained about!
Glider No. 2 with WinchSpeed installed as seen from the winch driver's position, a perfect winch start:

|
Modernization of winch unit
When PFG decided to use the system in their club gliders, I promised to modernize the winch receiver. The electronics are now assembled on one print instead of the 3 prototype prints, and an audio amplifier and speaker have been added.Here you can see and hear the print playing a test sequence:
If you are interested in the home production of prints, I have some tricks here: Rivet tool
A new box, much smaller than the prototype, has also been produced:

New test receiver
Since PFG bought all my gear, I had to make an extra test receiver for myself. It was done, but at the same time I thought it would be nice to have a simple test receiver with a built-in battery as an aid when installing the system in aircraft, so that you can find the best place to place the aircraft's transmitting unit.
I then developed it. It is a standalone test receiver which shows the received signal strength on a diode display. No need for external power supply and Android phone.
There is a built-in Li-ION cell with associated charger. When you press the switch, the program starts and continues to run as long as a signal is received. After a few minutes without a signal, the device turns itself off.
Here the receiver is seen in operation together with a test transmitter, notice the special placement of LEDs on the edge of the print, not seen before:
Winchstart in OP 2024-06-29
This is how it went when a newly minted Danish champion in aerobatics was put in charge of the winch:
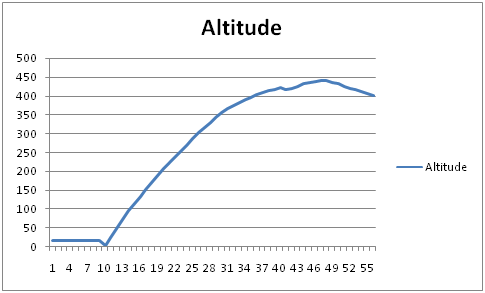
A very satisfied pilot released after just over 40 seconds. Measurements from the aircraft's variometer and IGC logger.
And from here a thank you to the winch drivers involved, who have been exposed to the iteration of the system, and especially thanks for very constructive feedback, which has now mostly been incorporated into the system. However, blue LEDs at too fast speeds had to be abandoned: they simply do not shine brightly enough.